




This week we go a little deeper into the automated and robotic container unloading solutions available on the market and how these solutions could shape the future of indent receiving operations. Last week, we reviewed the container unloading process and how for years engineers have tried to automate parts of the process known as de-stacking but how humans are still able to do it better ‘on the fly’. The challenge of a ‘stack face’ which has a high tendency to shift during the sea-bound voyage it must endure has made it very hard to completely automate this process. But there are a couple of companies who have persisted in this area and have note-able solutions which can help you solve the challenges associated with container unloading (well at least for a select SKU range…).

Source: http://www.teun.com/en/home/
TEUN
Back in 2011, I was trawling the internet and I came across a neat little concept from an unknown Dutch company called TEUN. The fact that this concept was available 8 years ago, but it is still highly unlikely that you see such a solution in operation today highlights the hidden complexities of this solution. Looking through the TEUN website and watching the simulated videos of their solution shows great innovation and foresight. But look closely at the handling unit being used by the robotic de-stacking unit and the uniformity of the stack-face from which it is picking and you can see that this ‘Nirvana’ state is not realistic and underestimates the real-word challenges when opening those container doors.
What the TEUN concept did do, was offer a mobile and relatively compact solution that solved the complete unloading process from de-stack to palletising for loose loaded containers. The concept of a skid mounted system involving a De-stacking Robot which also immediately palletised the load and moved it away from the area (have a close look at the concept and ask yourself how you replace the outbound pallet once the skid is in the container?!). As they predict on their website this concept would “bring about a revolution in unloading freight-containers”. Only I think they expected it to happen a lot quicker than it has. We all did to be honest, but here we are in 2019 and available technologies are still facing the same challenges but at least now we’re finding new and cleverer ways to solve them.

Source: Copal
Copal Handling Systems – Assisted Robotic Unloading
Copal Handling Systems have been one of the leaders in automated container unloading and palletising solutions for some time, but for one reason or another they continued to have very limited deployments. I’ve been a fan of this solution since the first time I came across it in 2013 and it was great to finally meet them at Megatrans 2018. Talking to them, revealed that they have made strides in their load handling devices at the stack face enabling a wider handling profiles including sacks of Coffee Beans which had been a large growth market for them. Their research into different load handling units had been crucial to their success.
The Copal Handling solution is quite neat in that it has the ability for an operator to interact with the machine through a set of controls similar to other materials handling equipment. Using the operators inputs and feedback the robotic system is then able to use its onboard vision to perform most of the de-stuff autonomously. Copal look at the bigger picture too and are able to offer the palletising systems to meet your complete inbounding requirements. The aim here is that you are able to do the work of 3 people with 1 person who mainly focuses on aligning the machine and dealing with exceptions at the pack face.

Source: Copal
The Copal load handling unit (on the De-Stacking Robot) for standard floor-stacked containers uses a set of vacuum grippers to manipulate a whole row of cartons at the stack face and transfer them onto a belt takeaway conveyor which then feeds the outbound cartons to a palletising Robot. It seems simple enough, but the palletising robot can quickly become the bottleneck as the De-Stacking robot removes cartons from the pick face. When asked about this challenge, the Copal representative acknowledged it was an area that required detailed design for specific applications to meet their requirements. However, by making this robotic system semi-autonomous and enabling operator interaction they have managed to build flexibility into a versatile and feasible solution. Others have taken a more automated approach which I believe are still some years away operational deployments.
Source: Bastian
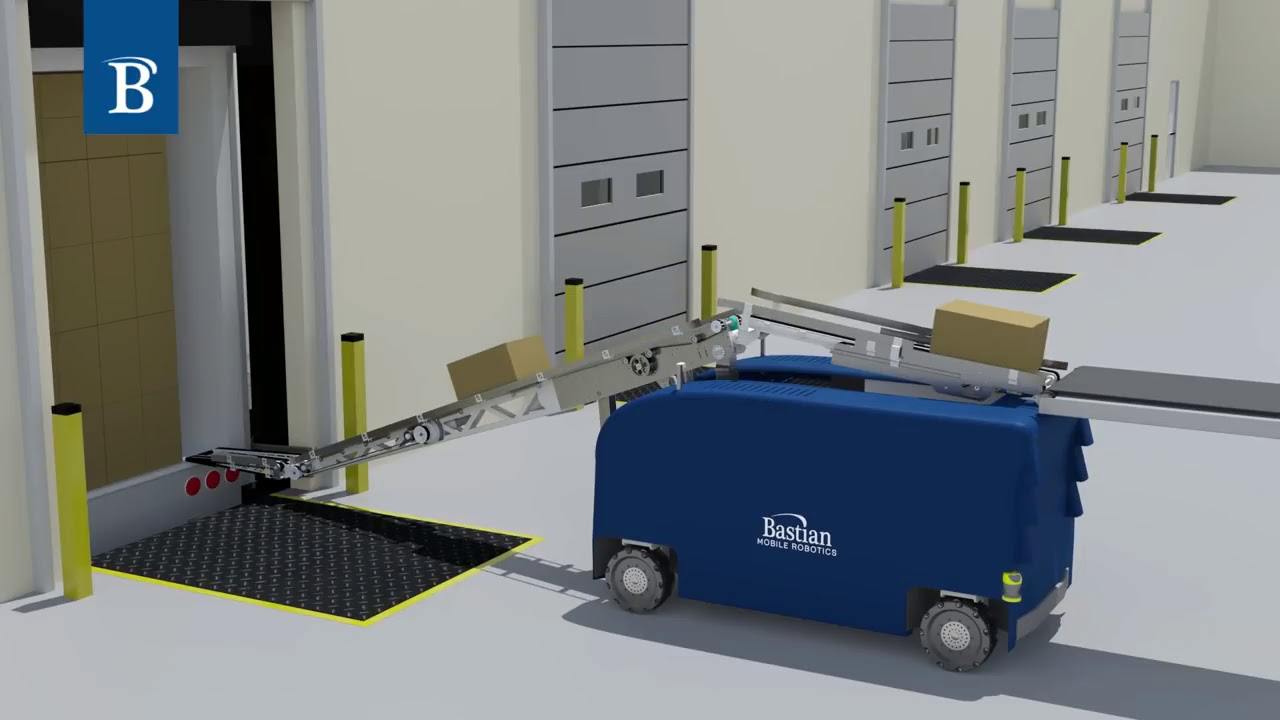
Autonomous Container Unloading
ULTRA is an interesting autonomous container unloading solution from Bastian Solutions. The concept enables both packing and unpacking of a container using an interesting design which encompasses mobility with a low-inertia extending conveyor and a unique load handling device. Quite a neat solution but once again it assumes a highly uniform stack-face and I’m not sure how the load handling unit would deal with a collapsed stack face. Interesting idea, but not very feasible in my opinion (Note: Bastian has trialed a mobile robotic solution which travels into the container, but very limited details are available). The ULTRA is also only addressing the de-stack and move out of container issue but not the palletising or storage unit challenge which can be the greatest as discussed last week. In a world where you are able to store every inbound carton in a mini-load ASRS type environment, this may work for a portion of your inbound volume, but there would still be many challenges to address before a real productivity increase.
Motoman have also been showing off fully autonomous robotic picking solution for some time with an early video from 2013 showing its capabilities back then. It looks like this video was a collaboration with Wynright Robotics. This is once again a reminder of how the potential for autonomy in Container unloading has been there for some time but has not been fulfilled due to the challenges we’ve discuss over these last 2 weeks. https://www.youtube.com/watch?v=QAF8xYYzHBM Wynright has since been purchased by Daifuku which means that this solution set depends on a case-level takeaway and sortation system (great for cross-docking) or automated mini-load storage solution.
And there have been many pilot programs by the large freight companies (DHL’s Parcel Robot Porject)
If we review the solutions outlined above, they are all trying to address the stack-face manipulation with a robotic gripper or Load Handling Unit (LHU) in order to manipulate the floor-stacked cartons onto an outbound conveyor. Whether it’s the CoPal solutions which is looking to grab multiple cartons or the ULTRA and Motoman solutions which are looking to handle one carton at a time, effectively handling the cartons at the stack face has been attempted using a singular handling system making it difficult to deal with collapsed and non-uniform stack faces. But this is where “The Beast” who we introduced last week, does things differently.

Source: Honeywell
Understanding “The Beast”
Last week we introduced “The Beast” from Honeywell (That’s what they called it at Promat 2019). It looks like a cross between and underground mining machine and a large palletising robot. Not only is the scale and technology of the Robotic Unloader impressive but its’ capacity to eat through a container is unrivalled and this comes thanks to an interesting approach in solving the de-stack challenge.
The Robotic Unloader from Honeywell is the first autonomous load container unloading solution that I’ve seen to use a two-pronged approach at the stack-face. Not only does it utilise a large robotic vacuum gripper that looks to span the entire width of the container, it also has a moveable platform equipped with varying speed slug belts to ingest cartons and mechanically singulate them as they make their way down-stream. It is very impressive to watch! It’s quite a simple method which I compare to using a dust pan and broom to match your ‘sweeping’ different heights within the container. Although my first thought was around the fragility and possible damage from this collapse and sweep type method, the large gripper is able to control the ‘collapsing’ of the stack face onto the takeaway conveyors. Added to this the synchronised height movements of this slug takeaway conveyor cluster it ends ap being a relatively soft landing for the cartons as they make their way out of the container.

Source: Honeywell
This solution definitely increases the rate of de-stuffing containers beyond what we’ve seen before. But conversely it means that the outbound flow of cartons is greater as well, posing the same palletising or storage challenges we’ve outlined previously. I would have to say that for now, without understanding the exact investment required for one of these systems (circa $800K USD for the Robotic Unloader alone) you would need a high container volume as well as a highly automated sortation system (for cross-docking) or a high throughput ASRS system for putaway in order to keep up. So we come full circle in that it doesn’t matter how fast you can unload a container at the stack-face if you can’t keep up in your receiving process to generate the best unit load for storage. For now, at least we know we’ve made progress in this area and that designing fully autonomous robotic container unloading solutions require an end-to-end integrated approach.
Jeffrey Triantafilo is a Systems Improvement Engineer in Intralogistics for Fuzzy LogX an Australian boutique consulting firm, based in Inner-Western Sydney, focused on helping Warehousing and Distribution Operations improve and stay competitive in today’s ever-changing supply chain environment. If you’d like to have a chat with jT or one of his colleagues about improvements in your operation, click here.